- Trang Chủ
- Giới thiệu
- Sản phẩm
- Khóa Học
- Học tập
- Chính sách
- Dịch vụ
- Thiết Kế và Lập Trình Mạch Điện Tử Theo Yêu Cầu
- Thiết Kế và Giải Pháp IOT
- Thiết Kế Phần Mềm Ứng Dụng cho Doanh Nghiệp, Nhà Máy (smart Factory)
- Tự Động Hóa, Scada Trong Công Nghiệp
- Bãi xe tự động Nha Trang (Lắp đặt, thiết kế)
- Xây Dựng Phòng Thí Nghiệm, Mô Phỏng 3D
- Giải Pháp Ứng Dụng Trí Tuệ Nhân Tạo (AI)
- Liên hệ
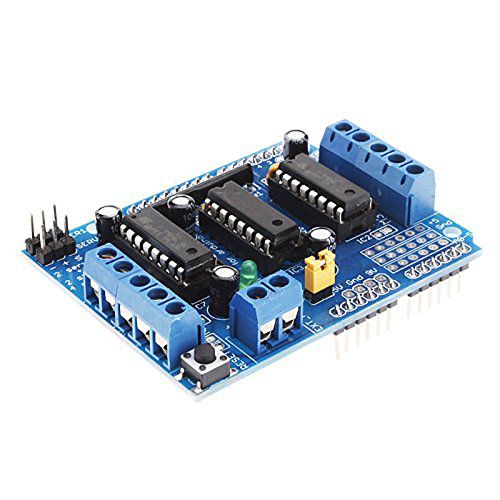
Mạch điều khiển động cơ L293D
Mạch điều khiển động cơ L293D là một phần board mở rộng cho các board arduino, dùng để điều khiển các loại động cơ DC, động cơ bước và động cơ servo. Arduino Motor Shield được thiết kế gọn gàng, đẹp mắt và tương thích hoàn toàn với các board Arduino: arduino uno r3, arduino leonardo, arduino mega2560, giúp bạn có thể sử dụng và điều khiển một cách dễ dàng và nhanh chóng.
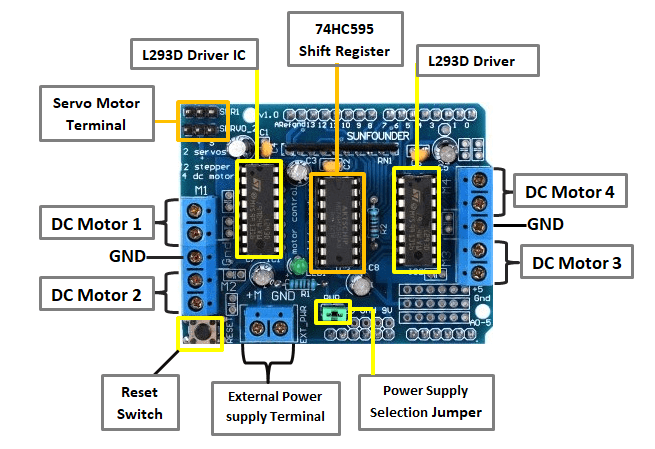
Arduino Motor Shield sử dụng 2 IC cầu H L293D hoàn chỉnh với các chế độ bảo vệ và 1 IC logic 74HC595 để điều khiển các động cơ.
Mạch điều khiển động cơ L293D có thể điều khiển nhiều loại motor khác nhau như step motor, servo motor, motor DC, với mức áp lên đến 36V, dòng tối đa 600mA cho mỗi kênh điều khiển.
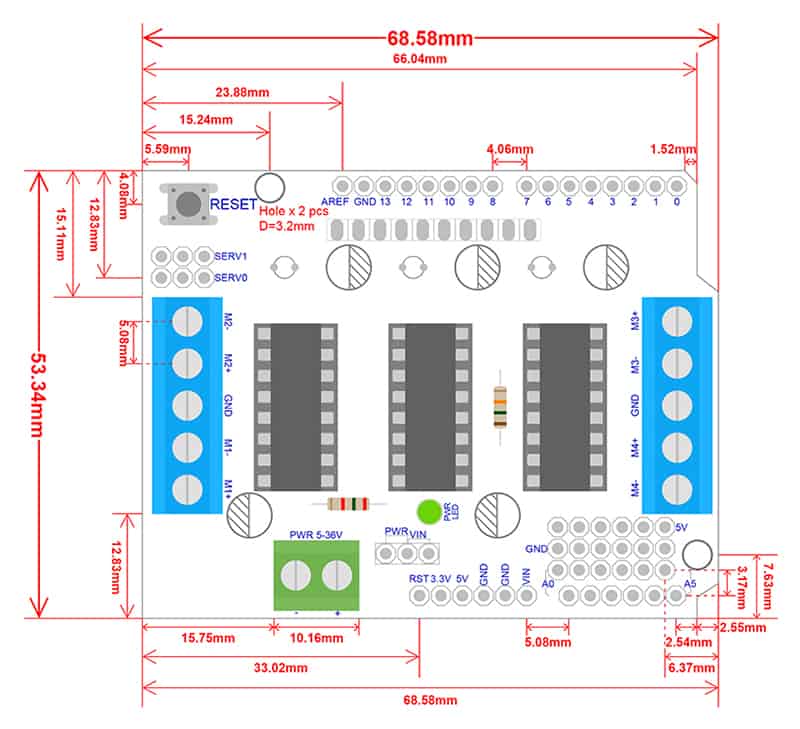
THÔNG SỐ KỸ THUẬT:
- Điện áp đầu vào: 4.5V đến 36V.
- Tương thích với các board Arduino Uno R3, Arduino Leonardo R3 và Arduino Mega 2560.
- Có thể điều khiển động cơ DC (4 động cơ), động cơ servo (2 động cơ) và động cơ bước (2 động cơ). 2 cổng điều khiển servo motor được đánh dấu: Servo_1 và Servo_2 trên linh kiện. Các cổng điều khiển động cơ DC được đánh dấu lần lượt là M1, M2, M, M4, chân giữa là chân GND.
- 2 cổng điều khiển động cơ servo có điện áp vào 5V với timer có độ phân giải cao, phù hợp cho các ứng dụng điều khiển bằng Arduino có độ chính xác cao. Đặc biệt không có jitter.
- Có 2 IC Driver L293D, do đó sẽ có 4 cầu H để điều khiển được 4 động cơ DC. Mỗi cầu H có dòng ra tối đa 0.6A (dòng chịu đựng cực đại là 1.2A) ở mỗi kênh điều khiển.
- Các cổng M dùng điều khiển động cơ DC được điều khiển bằng tín hiệu PWM.
- Driver còn hỗ trợ điều khiển 2 động cơ bước, với 2 cổng dùng cho 2 động cơ servo có thể được dùng cho động cơ bước. Với Shield L293D, động cơ bước có thể vận hành ở tất cả các chế độ: full step, half step và micro-step. Động cơ bước dùng cho driver có thể là loại đơn cực (unipolar) hoặc lưỡng cực (bipolar).
- Có sẵn nút RESET để khởi động lại board Arduino
Cụ thể là điều khiển được số lượng motor như sau:
- 2 jack cắm điều khiển 2 động cơ RC servo.
- 4 ngõ ra điều khiển đến 4 động cơ DC độc lập.
- 2 động cơ step motor loại đơn cực (unipolar) hoặc lưỡng cực (bipolar)
- Mạch tích hợp điện trở nối GND giúp cho không tự chạy khi khởi động board.
Các chân mà Arduino Motor Shield sử dụng là:
- Chân điều khiển 2 RC servo được kết nối với chân số 9 và 10. Nguồn cung cấp được lấy trực tiếp từ board Arduino.
- Motor 1 nối với chân 11
- Motor 2 nối với chân 3
- Motor 3 nối với chân 5
- Motor 4 nối với chân 6
- Chân 4, 7, 8, 12 dùng điều khiển motor thông qua IC 74HC595
Ngoài ra để tiện cho việc sử dụng nguồn cắm ngoài, trên Arduino Motor Shield sử dụng 1 jumper PWR mục đích để lấy nguồn ngoài thông qua jack DC của board arduino để cung cấp nguồn cho motor hoạt động. Nếu trong trường hợp chúng ta không sử dụng jumper này thỉ phải cấp 1 nguồn riêng vào chân EXT_PWR để cấp nguồn cho motor hoạt động.
Sản phẩm cùng danh mục

LIÊN HỆ
Trả lời nhanh chóng
GỞI THÔNG TIN ĐỂ NHẬN TƯ VẤN
Tài khoản giao dịch
Chủ tài khoản: Mr. Nhân
MBBank: 010419987979
(Chi nhánh Nha Trang, Khánh Hòa)
Tài khoản giao dịch
Chủ tài khoản: Mr. Thông
VietCombank: 0061001055299
(Chi nhánh Nha Trang, Khánh Hòa)MB Bank: 8000620012009
(Chi nhánh Nha Trang, Khánh Hòa)MẠNG XÃ HỘI
Chi nhánh Nha Trang
Số 21 Đường B4, KĐT VCN Phước Long, P.Phước Long, TP. Nha Trang, Khánh Hòa
0931.182.204
lkdientunhatrang@gmail.com
Chi nhánh Đà Lạt
75-77 Nguyễn Hoàng, Phường 7, TP Đà Lạt, Lâm Đồng
0972.879.983